
Onderzoekers hebben een betaalbare, energie-efficiënte robothand ontworpen die verschillende voorwerpen kan vastpakken door alleen zijn pols te bewegen en het gevoel in zijn ‘huid’ te gebruiken.
Regelmatig worden er nieuwe robots ontwikkeld, de één nog handiger dan de ander. Maar waar ze allemaal nog niet aan kunnen tippen, is de behendigheid en het aanpassingsvermogen van de menselijke hand. Zelfs de meest geavanceerde robots van vandaag zijn niet in staat om manoeuvres uit te voeren die voor kleine kinderen, nou ja, kinderspel zijn. Zo weten mensen bijvoorbeeld instinctief met hoeveel kracht ze een ei moeten optillen. Voor een robot is zo’n simpele taak een hele uitdaging: te veel kracht en het ei breekt, maar te weinig kracht en het valt op de grond.
Lees ook:
- MIT ontwerpt manusje-van-alles-robots voor op de maan
- Robot lost Japans tekort aan landbouwers deels op
- Dit exoskelet maakt je 9 kilo lichter
Handig
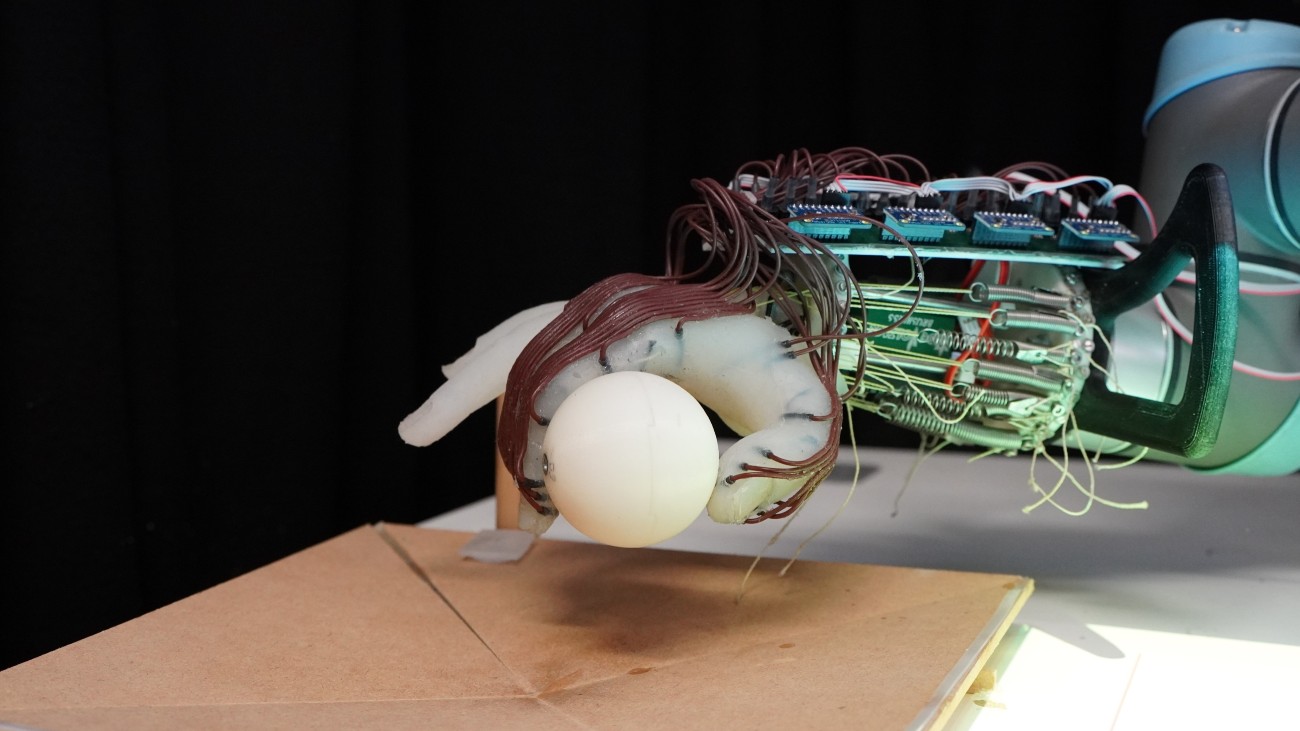
Onderzoekers van de Universiteit van Cambridge hebben daar nu vooruitgang in geboekt. Hun zachte, 3D-geprinte robothand kan namelijk verschillende voorwerpen vastpakken met de juiste druk. Daarnaast is deze bot energiezuinig. Een volledig aangedreven robothand, met motoren voor elk vingergewricht, heeft namelijk flink veel energie nodig. De nieuwe robot kan alleen zijn pols bewegen en verbruikt daardoor minder energie. Door die passieve beweging – dus zonder actief voorwerpen vast te pakken met de vingers – is hij bovendien veel makkelijker te besturen.
Ondanks dat de vingers niet apart bestuurbaar zijn, kunnen ze wel samentrekken doordat er ook kunstmatige pezen in de hand zijn ingebouwd. Wanneer een voorwerp tegen de binnenkant van een vinger drukt, en dus op de pees, kromt de vinger zich als het ware om het voorwerp heen. Zo kan de hand toch voorwerpen vasthouden. Daarnaast heeft het onderzoeksteam tastsensoren in de hand geïmplanteerd, zodat de robot kan voelen wanneer hij iets aanraakt. Ook gebruikt de hand de informatie afkomstig van zijn huid om te voorspellen of hij een voorwerp dreigt te laten vallen of niet.
Bubbeltjesplastic
De onderzoekers voerden meer dan 1200 tests uit met de robothand. Elke keer keken ze of hij in staat was om kleine voorwerpen vast te pakken zonder ze te laten vallen. Eerst trainden ze de robot met kleine 3D-geprinte plastic balletjes. De beweging om een balletje vast te pakken, was gebaseerd op een menselijke actie en hadden ze van tevoren in de robot geprogrammeerd. De robot gebruikte vervolgens trial-and-error om te leren wat voor soort greep zou werken. Met de tastsensoren en het zelflerende Long Short-Term Memory (LSTM)-netwerk kon de robot vervolgens voorafgaand aan de actie al inschatten of hij zou slagen, met een nauwkeurigheid tot wel 100%.
Na de training met de balletjes moest hij verschillende voorwerpen vastpakken, zoals een perzik en een rol bubbeltjesplastic. In deze tests was de hand in staat om 11 van de 14 alledaagse dingen succesvol vast te pakken. De drie voorwerpen waar de robot minder goed mee overweg kon, waren een houtblok, een zakje gemalen koffie en een computermuis. De onderzoekers denken dat dit komt door de asymmetrische vormen van deze voorwerpen en dat het succes van de actie erg afhangt van de startpositie van het voorwerp. Om dat op te lossen, willen ze in een volgend onderzoek visuele sensoren toevoegen aan het systeem.
Oplader
Hieronder zie je hoe de handrobot erin slaagt om een voorwerp op te tillen en vast te houden. In het filmpje gaat het om een oplader met het snoer eromheen gerold. Linksboven is een diagram zichtbaar met de live voorspelling van de robot of hij slaagt of niet. Hoe lager de lijn, hoe groter het programma de kans op succes inschat. Doordat de hand alleen passief – dus via de pols – wordt aangestuurd, kan hij een voorwerp niet expres loslaten. Daarom eindigt de hele actie bij een stokje, dat het voorwerp uit de greep van de robot drukt.
Bronnen: Advanced Intelligent Systems, University of Cambridge via EurekAlert!
Beeld: Universiteit van Cambridge